Pogo Stick Microcopter Bounces off Floors and Walls
We tend to think about hopping robots from the ground up. That is, they start on the ground, and then, by hopping, incorporate a aerial phase into their locomotion. But there’s no reason why aerial robots can’t approach hopping from the other direction, by adding a hopping ground phase to flight. Hopcopter is the first robot that I’ve ever seen give this a try, and it’s remarkably effective, combining a tiny quadrotor with a springy leg to hop hop hop all over the place.
Songnan Bai, Runze Ding, Song Li, and Bingxuan Pu
So why in the air is it worth adding a pogo stick to an otherwise perfectly functional quadrotor? Well, flying is certainly a valuable ability to have, but does take a lot of energy. If you pay close attention to birds (acknowledged experts in the space), they tend to spend a substantial amount of time doing their level best not to fly, often by walking on the ground or jumping around in trees. Not flying most of the time is arguably one of the things that makes birds so successful—it’s that multimodal locomotion capability that has helped them to adapt to so many different environments and situations.
Hopcopter is multimodal as well, although in a slightly more restrictive sense: Its two modes are flying and intermittent flying. But the intermittent flying is very important, because cutting down on that flight phase gives Hopcopter some of the same efficiency benefits that birds experience. By itself, a quadrotor of hopcopter’s size can stay airborne for about 400 seconds, while Hopcopter can hop continuously for more than 20 minutes. If your objective is to cover as much distance as possible, Hopcopter might not be as effective as a legless quadrotor. But if your objective is instead something like inspection or search and rescue, where you need to spend a fair amount of time not moving very much, hopping could be significantly more effective.
Hopcopter is a small quadcopter (specifically a Crazyflie) attached to a springy pogo-stick leg.Songnan Bai, Runze Ding, Song Li, and Bingxuan Pu
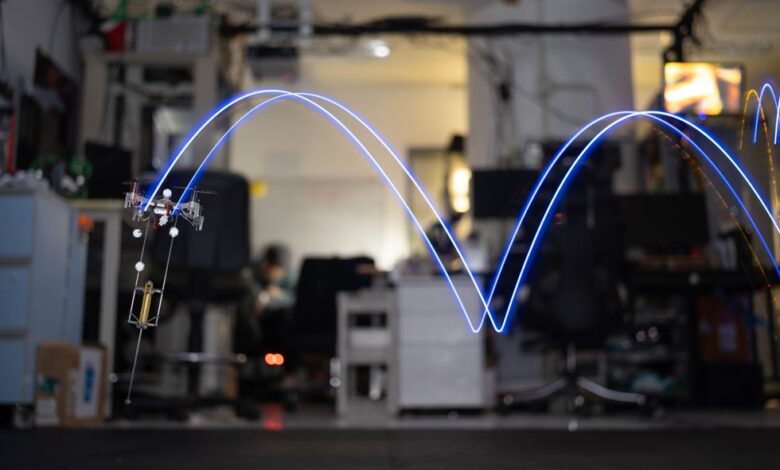
The actual hopping is mostly passive. Hopcopter’s leg is two rigid pieces connected by rubber bands, with a Crazyflie microcopter stapled to the top. During a hop, the Crazyflie can add directional thrust to keep the hops hopping and alter its direction as well as its height, from 0.6 meters to 1.6 meters. There isn’t a lot of room for extra sensors on Hopcopter, but the addition of some stabilizing fins allow for continuous hopping without any positional feedback.
Besides vertical hopping, Hopcopter can also position itself in midair to hop off of surfaces at other orientations, allowing it to almost instantaneously change direction, which is a neat trick.
Hopcopter can reposition itself on the fly to hop off of different surfaces.Songnan Bai, Runze Ding, Song Li, and Bingxuan Pu
And it can even do mid air somersaults, because why not?
Hopcopter’s repertoire of tricks includes somersaults.Songnan Bai, Runze Ding, Song Li, and Bingxuan Pu
The researchers, based at the City University of Hong Kong, say that the Hopcopter technology (namely, the elastic leg) could be easily applied to most other quadcopter platforms, turning them into Hopcopters as well. And if you’re more interested in extra payload rather than extra endurance, it’s possible to use hopping in situations where a payload would be too heavy for continuous flight.
The researchers published their work 10 April in Science Robotics.
IEEE Spectrum



