Video Friday: Lunar Transport
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
ICRA 2023: 29 May–2 June 2023, LONDON
Energy Drone & Robotics Summit: 10–12 June 2023, HOUSTON
RoboCup 2023: 4–10 July 2023, BORDEAUX, FRANCE
RSS 2023: 10–14 July 2023, DAEGU, SOUTH KOREA
IEEE RO-MAN 2023: 28–31 August 2023, BUSAN, SOUTH KOREA
IROS 2023: 1–5 October 2023, DETROIT
CLAWAR 2023: 2–4 October 2023, FLORIANOPOLIS, BRAZIL
Humanoids 2023: 12–14 December 2023, AUSTIN, TEXAS
Enjoy today’s videos!
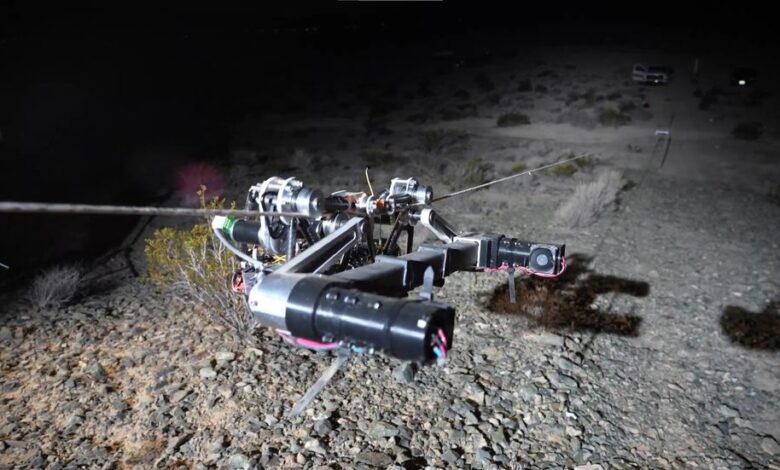
LATTICE is an undergrad project from Caltech that’s developing a modular robotic transportation system for the lunar surface that uses autonomous rovers to set up a sort of cable car system to haul things like ice out of deep craters to someplace more useful. The prototype is fully functional, and pretty cool to watch in action.
We’re told that the team will be targeting a full system demonstration deploying across a “crater” on Earth this time next year. As to what those quotes around “crater” mean, your guess is as good as mine.
[ Caltech ]Thanks, Lucas!
Happy World Cocktail Day from Flexiv!
[ Flexiv ]
Here’s what Optimus has been up to lately.
As per usual, the robot is moderately interesting, but it’s probably best to mostly just ignore Musk.
[ Tesla ]The INSECT tarsus-inspired compliant robotic grippER with soft adhesive pads (INSECTER) uses only one single electric actuator with a cable-driven mechanism. It can be easily controlled to perform a gripping motion akin to an insect tarsus (i.e., wrapping around the object) for handling various objects.
[ Paper ]
Thanks, Poramate!
Congratulations to ANYbotics on their $50 million Series B!
And from 10 years ago (!) at ICRA 2013, here is video I took of StarlETH, one of ANYmal’s ancestors.
[ ANYbotics ]
In this video we present results from the recent field-testing campaign of the DigiForest project at Evo, Finland. The DigiForest project started in September 2022 and runs up to February 2026. It brings together diverse partners working on aerial robots, walking robots, autonomous lightweight harvesters, as well as forestry decision makers and commercial companies with the goal to create a full data pipeline for digitized forestry.
[ DigiForest ]
The Robotics and Perception Group at UZH will be presenting some new work on agile autonomous high-speed flight through cluttered environments at ICRA 2023.
[ Paper ]
Robots who lift together, stay together.
[ Sanctuary AI ]
The next CYBATHLON competition, which will take place again in 2024, breaks down barriers between the public, people with disabilities, researchers and technology developers. The initiative promotes the inclusion and participation of people with disabilities and improves assistance systems for use in everyday life by the end users.
[ Cybathlon ]
IEEE Spectrum